
Med 50 års erfaring inden for robotteknologi har Kawasaki akkumuleret en bred vifte af applikationsteknologier inden for alle områder og brancher. Vi understøtter kundernes behov for at automatisere deres produktionslinjer og forbedre produktiviteten. Applikationseksemplerne her giver kun et kort kig på vores store erfaring.
Ansøgningsliste
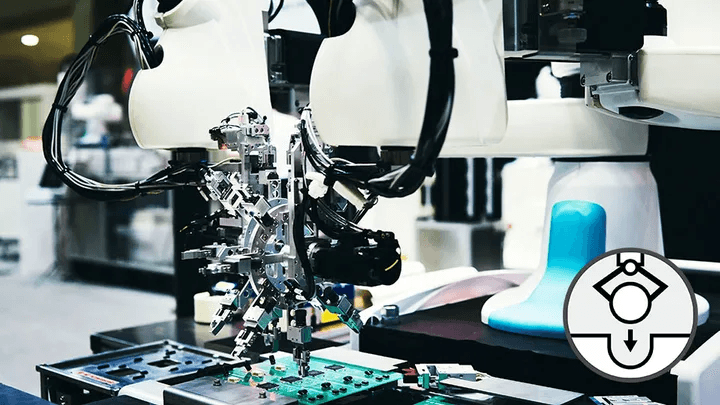
montage
Processen med at kombinere flere dele for at fremstille komponenter eller produkter, montage udføres i forskellige fremstillingssektorer, herunder maskiner, elektronik og elektriske sektorer.
Montering dækker over forskellige opgaver, herunder montage af små præcisionsdele og store og tunge emner.
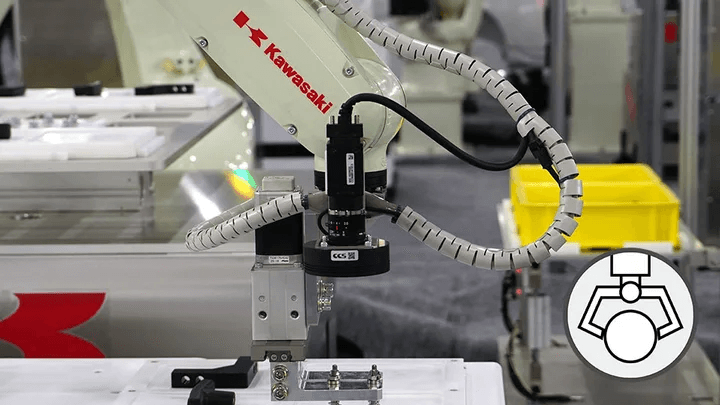
Materiel håndtering
Processen med at flytte materialer, dele og produkter fra et sted til et andet, materialehåndtering udføres i næsten alle industrier, ikke kun i fremstillingsindustrien.
Til materialehåndtering er industrirobotter oftest brugt til forskellige formål, herunder højhastighedstransport af små dele og håndtering af tunge genstande, som mennesker ikke kan bære.
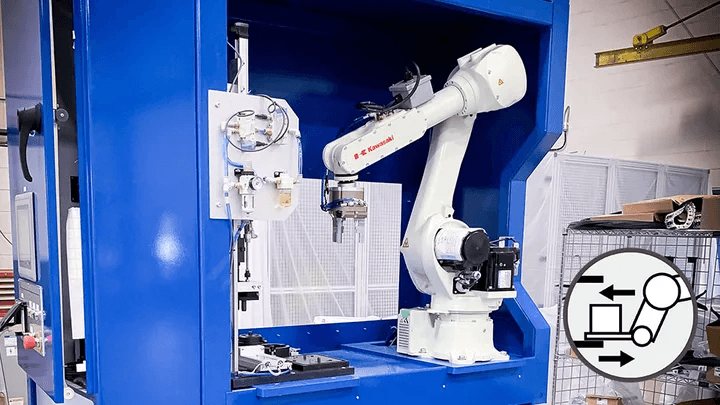
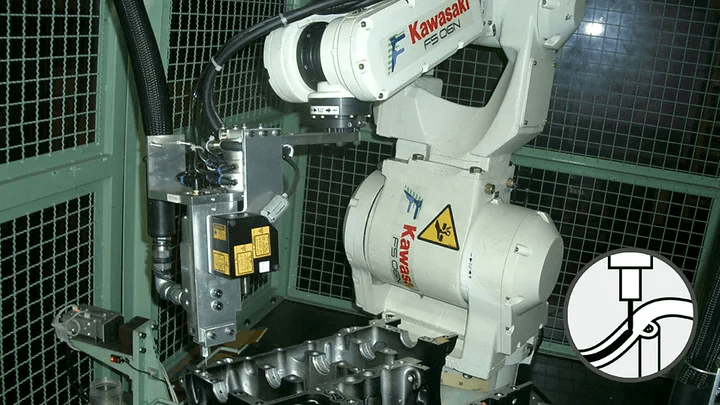
Maskinpleje
En kritisk proces i maskinindustrien, maskinpleje involverer indlæsning af dele i NC-værktøjsmaskiner og aflæsning af dem, efter at deres bearbejdning er færdig. Ind- og udlæsning af forarbejdningsmaterialer ind og ud af smede- og pressemaskiner er også klassificeret som maskinpleje.

Palletering
Processen med at stable kasser, poser, flasker og andre produkter på paller, palletering udføres almindeligvis til forsendelse i fremstillingsindustrien såvel som i logistikindustrien. På den anden side er depalletering den modsatte proces, hvor produkter losses fra paller i rækkefølge.
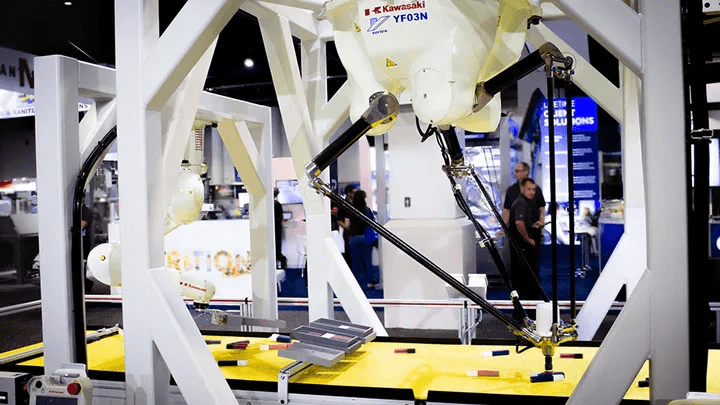
Pick & Place
Plukning, også kendt som "pluk og placer", er processen med at gribe emner fra et transportbånd og sortere dem ved høj hastighed.
Til dette formål bruges unikt formede robotter kaldet parallellink-typen (eller delta-typen).
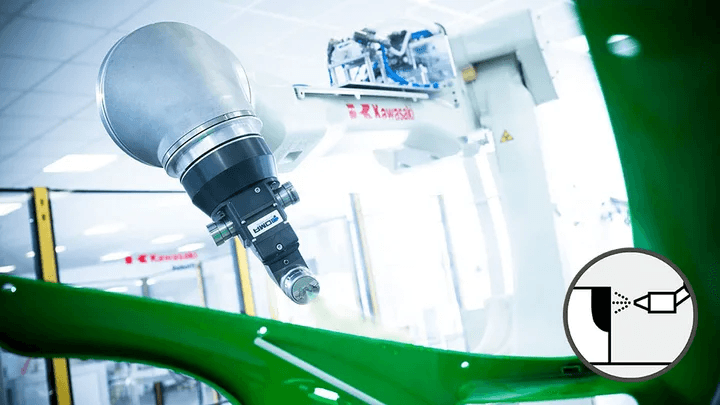
Maleri
Maling er processen med at påføre maling på produktoverflader, danne en belægningsfilm eller finish.
Fordi de fleste malingsmaterialer er meget flygtige, bruges eksplosionssikre robotter og malerudstyr til denne proces.
Forsegling / udlevering
Forsegling er processen med at påføre fugemasse eller klæbemiddel for at øge lufttætheden og udfylde rummet mellem materialer.
Forsegling udføres for mange produkter, såsom personbiler og husholdningsapparater.
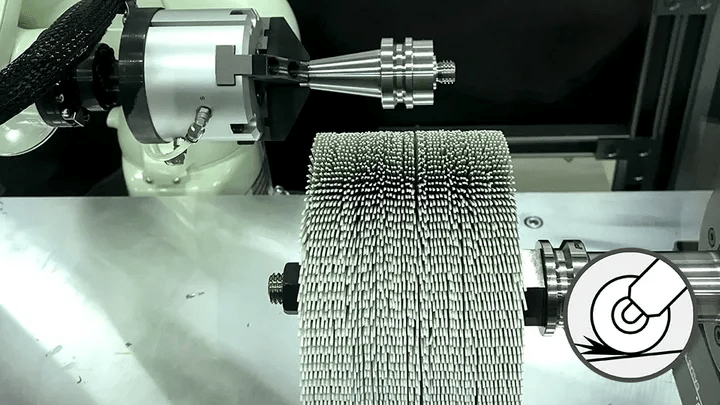
Fjernelse af materiale
Slibning og afgratning er processen med at fjerne udragende grater fra overfladerne af støbe- og smedeprodukter samt eftersvejsningsoverflader.
Denne proces, der involverer skrotning af grater med en kværn, kan være beskidt, farlig og krævende, hvor robotter kan spille vigtige roller.
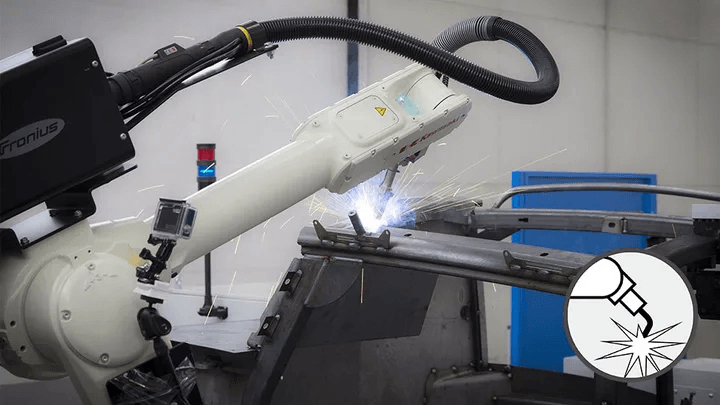
Arc Welding
Svejsemetoden, der bruger bueudladning til at forbinde metalmaterialer, buesvejsning udføres i vid udstrækning i maskin-, metal- og bilindustrien. Robotter og buesvejsere bruges til at samle materialerne, mens de smeltes.
Punkt svejsning
Punktsvejsning, også kendt som elektrisk modstandssvejsning, er processen med at svejse to basismaterialer ved at påføre elektrisk strøm med en elektrodestang og smelte dem med modstandsvarmen. Punktsvejsning er så almindeligt anvendt til at svejse stålplader af bilkarosserier, at et stort antal robotter bruges i bilindustrien.
Håndtering af siliciumwafer
Wafer-overførsel er håndteringen af wafers i front-end-processen af halvlederfremstillingsudstyr.
Denne proces bruger rene robotter og kræver høj præcision, høj hastighed og jævn bevægelse.