
Con 50 años de experiencia en robótica, Kawasaki ha acumulado una amplia gama de tecnologías de aplicación en todos los campos e industrias. Apoyamos las necesidades de los clientes para automatizar sus líneas de producción y mejorar la productividad. Los ejemplos de aplicación aquí solo brindan una breve mirada a nuestra vasta experiencia.
Lista de aplicaciones
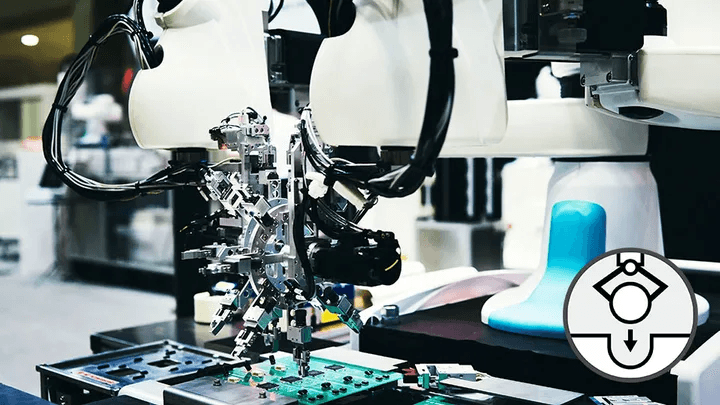
Montaje
El proceso de combinar múltiples partes para hacer componentes o productos, el ensamblaje se realiza en varios sectores de fabricación, incluidos los sectores de maquinaria, electrónica y electricidad.
El ensamblaje cubre varias tareas, incluido el ensamblaje de piezas pequeñas de precisión y piezas de trabajo grandes y pesadas.
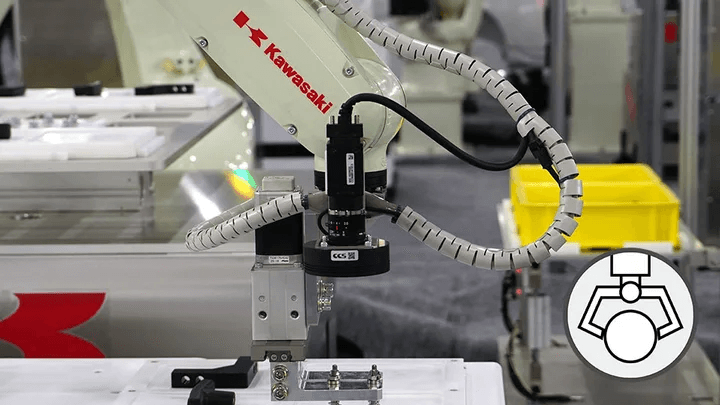
Manipulación de materiales
El proceso de mover materiales, partes y productos de un lugar a otro, el manejo de materiales se realiza en casi todas las industrias, no solo en la industria manufacturera.
Para el manejo de materiales, los robots industriales se usan más comúnmente para varios propósitos, incluido el transporte a alta velocidad de piezas pequeñas y el manejo de objetos pesados que los humanos no pueden transportar.
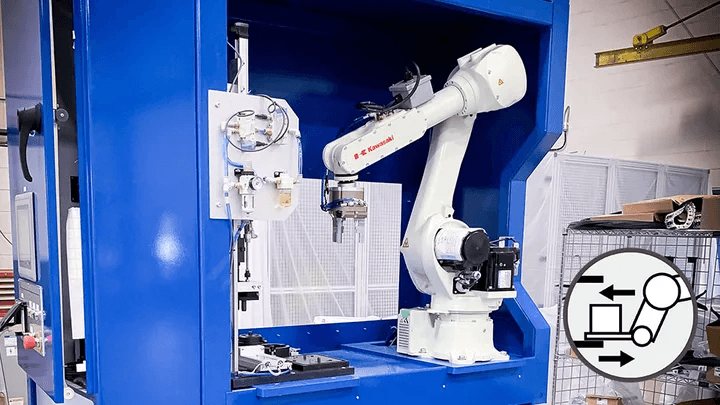
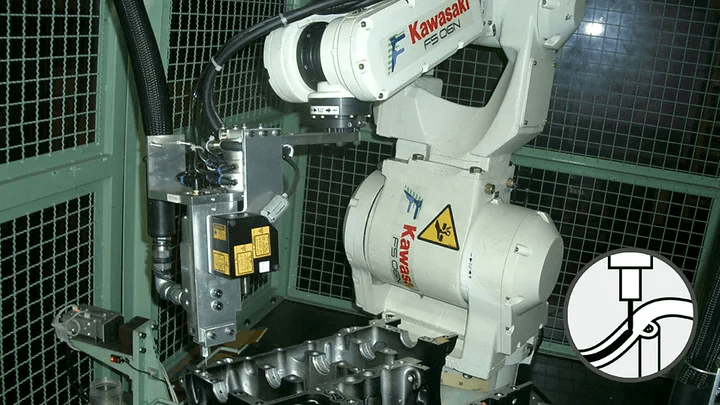
Cuidado de la máquina
Un proceso crítico en la industria de la maquinaria, la atención de máquinas implica cargar piezas en máquinas herramienta NC y descargarlas una vez que se completa el mecanizado. La carga y descarga de materiales de procesamiento dentro y fuera de las máquinas de forjado y prensado también se clasifica como cuidadora de máquinas.

Paletizado
El proceso de apilamiento de cajas, bolsas, botellas y otros productos en paletas, la paletización se realiza comúnmente para el envío en la industria manufacturera, así como en la industria logística. Por otro lado, el despaletizado es el proceso opuesto, donde los productos se descargan de los palets en orden.
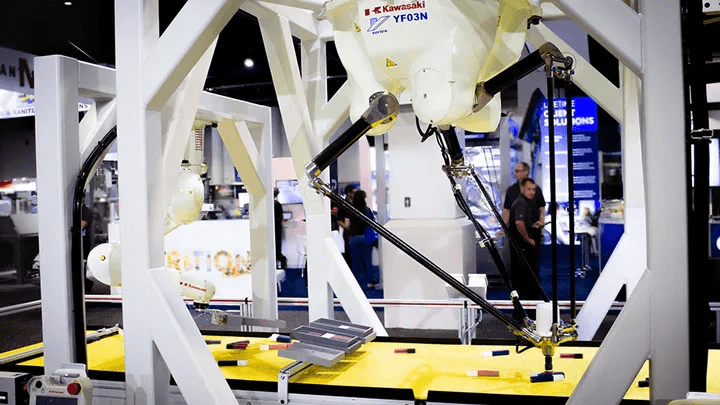
Escoger y colocar
La recolección, también conocida como "recoger y colocar", es el proceso de tomar piezas de trabajo de una cinta transportadora y clasificarlas a alta velocidad.
Para este propósito, se utilizan robots de forma única llamados tipo de enlace paralelo (o tipo delta).
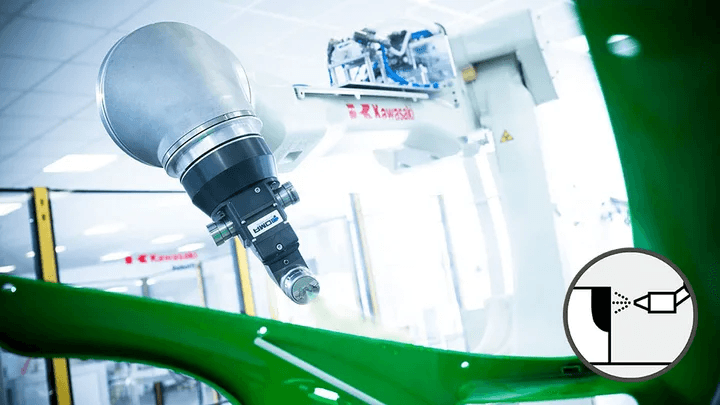
Pintura
La pintura es el proceso de aplicar pintura sobre las superficies del producto, formando una película de recubrimiento o acabado.
Debido a que la mayoría de los materiales de pintura son altamente volátiles, para este proceso se utilizan robots y equipos de pintura a prueba de explosiones.
Sellado / Dispensación
El sellado es el proceso de aplicar sellador o adhesivo para mejorar la hermeticidad y llenar el espacio entre los materiales.
El sellado se realiza para muchos productos, como vehículos de pasajeros y electrodomésticos.
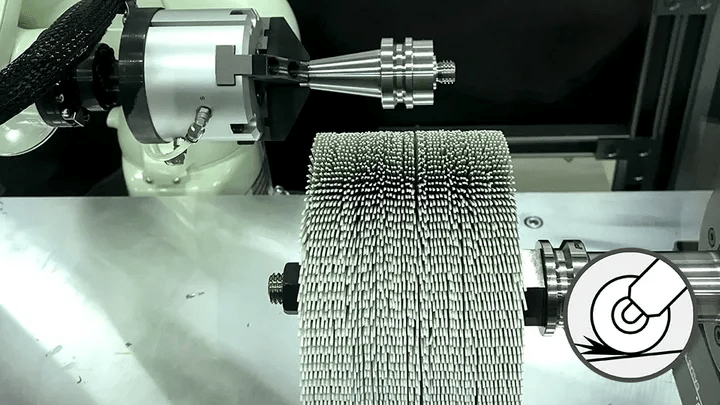
Eliminación de material
El esmerilado y desbarbado es el proceso de eliminar las rebabas que sobresalen de las superficies de los productos de fundición y forjados, así como de las superficies posteriores a la soldadura.
Este proceso, que implica eliminar las rebabas con un molinillo, puede ser sucio, peligroso y exigente en el que los robots pueden desempeñar un papel importante.
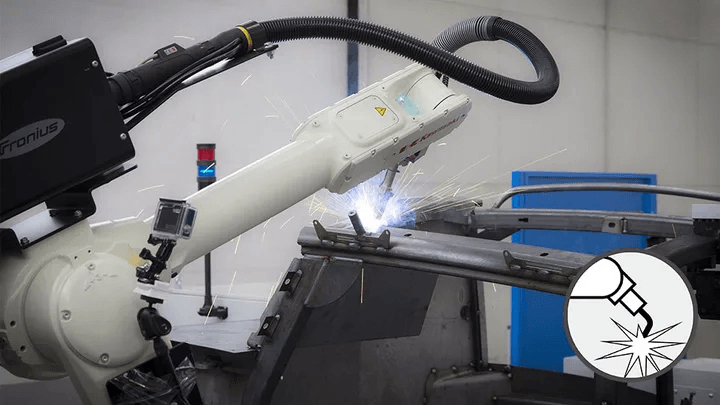
Soldadura por arco
El método de soldadura que utiliza descarga de arco para unir materiales metálicos, la soldadura por arco se realiza ampliamente en las industrias de maquinaria, metal y automotriz. Se utilizan robots y soldadores de arco para unir los materiales mientras los derriten.
Soldadura de punto
La soldadura por puntos, también conocida como soldadura por resistencia eléctrica, es el proceso de soldar dos materiales base mediante la aplicación de corriente eléctrica con una varilla de electrodo y su fusión con el calor de la resistencia. La soldadura por puntos se usa con tanta frecuencia para soldar placas de acero de carrocerías de automóviles que se utiliza una gran cantidad de robots en la industria automotriz.
Manipulación de obleas de silicio
La transferencia de obleas es el manejo de obleas en el proceso inicial de los equipos de fabricación de semiconductores.
Este proceso utiliza robots limpios y requiere un movimiento suave, de alta precisión y alta velocidad.